 Tomáš Pajdla is a Distinguished Researcher at the CIIRC – Czech Institute of Informatics, Robotics and Cybernetics (ciirc.cvut.cz) and an Assistant Professor at the Faculty of Electrical Engineering (fel.cvut.cz) of the Czech Technical University in Prague. He works in geometry, algebra and optimization of computer vision and robotics, 3D reconstruction from images, and visual object recognition. He is known for his contributions to geometry of cameras, image matching, 3D reconstruction, visual localization, camera and hand-eye calibration, and algebraic methods in computer vision (Google Scholar citations). He coauthored works awarded the best paper prizes at OAGM 1998 and 2013, BMVC 2002 and ACCV 2014. His talk will take place on Wednesday, November 2nd, 2016, 1pm in room E105.
Tomáš Pajdla is a Distinguished Researcher at the CIIRC – Czech Institute of Informatics, Robotics and Cybernetics (ciirc.cvut.cz) and an Assistant Professor at the Faculty of Electrical Engineering (fel.cvut.cz) of the Czech Technical University in Prague. He works in geometry, algebra and optimization of computer vision and robotics, 3D reconstruction from images, and visual object recognition. He is known for his contributions to geometry of cameras, image matching, 3D reconstruction, visual localization, camera and hand-eye calibration, and algebraic methods in computer vision (Google Scholar citations). He coauthored works awarded the best paper prizes at OAGM 1998 and 2013, BMVC 2002 and ACCV 2014. His talk will take place on Wednesday, November 2nd, 2016, 1pm in room E105.
3D Reconstruction from Photographs and Algebraic Geometry
Abstract: 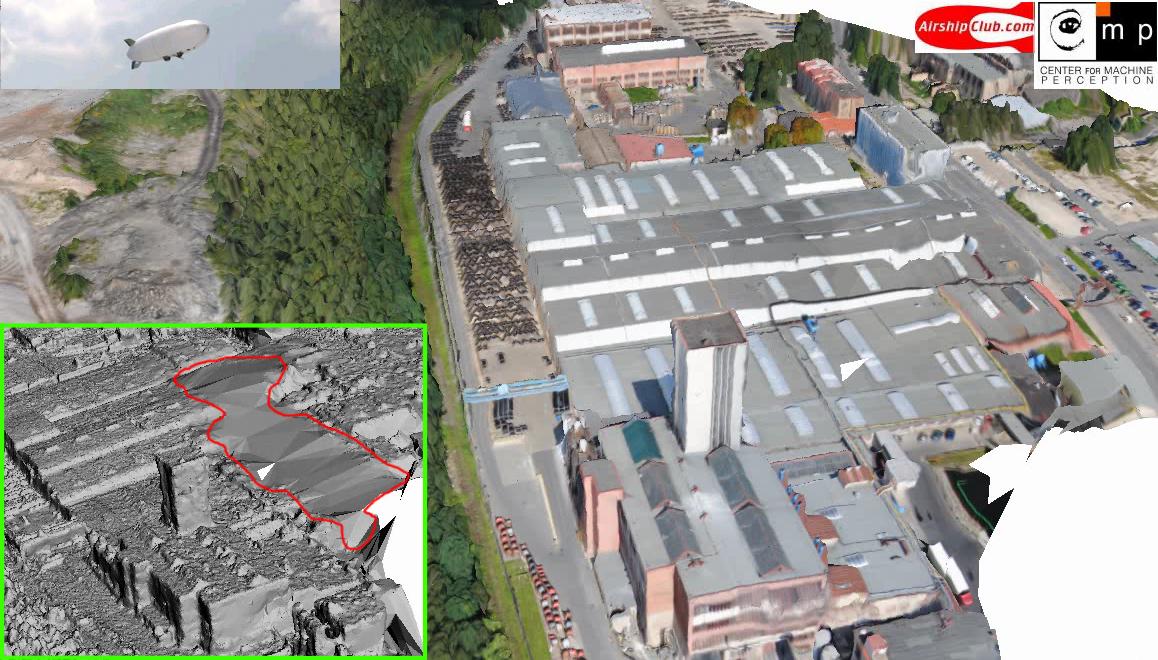 We will show a connection between the state of the art 3D reconstruction from photographs and algebraic geometry. In particular, we will show how some modern tools from computational algebraic geometry can be used to solve some classical as well as recent problems in computing camera calibration and orientation in space. We will present applications in large scale reconstruction from photographs, robotics and camera calibration.
We will show a connection between the state of the art 3D reconstruction from photographs and algebraic geometry. In particular, we will show how some modern tools from computational algebraic geometry can be used to solve some classical as well as recent problems in computing camera calibration and orientation in space. We will present applications in large scale reconstruction from photographs, robotics and camera calibration.